

Research Interests and Projects
Research Interests
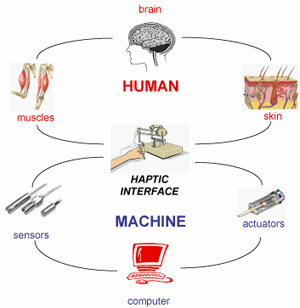
The Human Machine Interaction (HMI) Laboratory focuses on the design, control, implementation, and evaluation of mechatronic systems that are capable of haptic interaction — physical interaction with the user through the sense of touch. In particular, we develop and analyse principles and tools to enable physical human-robot interaction (pHRI) with a systems and controls perspective. We aim to achieve optimal performance for such systems, while simultaneously ensuring safety and ergonomic nature of interaction under the coupled dynamics of the human-robot system and the constraints imposed by human biomechanics/sensorimotor control. Our research extends to synthesizing algorithms for simulated physical interaction with virtual environments (haptic rendering) and exploring the control theoretical framework of human sensorimotor system through empirical investigations of skill acquisition.
Applications of our research include robotic devices for physical rehabilitation, active exoskeletons and prostheses for human augmentation, force-feedback devices for robot-assisted surgery, haptic interfaces for manual skill training, teleoperators for exploration of hazardous or remote environments, x-by-wire systems for automotive/aerospace industry, and service robots for collaborative task execution with humans. Our research contributes to the fields of robotics, system and controls, multi-body dynamics, mechanical design, biomechanics, physical medicine, and basic science.
The Cognitive Robotics (CogRobo) Laboratory is concerned with endowing robotic or software agents with higher level cognitive functions that involve reasoning, for example, about goals, perception, actions, the mental states of other agents, collaborative task execution, etc. Our research has mainly been on bridging the gap between high-level reasoning and low-level control, involving both theoretical and hands-on components.
Due the interdisciplinary and synergistic nature of this research area, we study various topics, including kinematic and dynamic modeling of robots, architectures for robot control, world maps and localization, object recognition, manipulation and path planning, human-robot interaction, AI planning, sensing and monitoring, diagnosis, robotic learning, representation and reasoning formalisms and algorithms, and methods for coupling high-level reasoning with low-level control
Research Grants
- Cognitive Cellular Warehouses: An Innovative Robotic Logistics Paradigm
TÜBİTAK Primary Subjects R&D Funding Program (TÜBİTAK 1003) (2019 – 2021)
Researcher (Principle Investigator: Prof. Esra Erdem) Industry Partner: Ekol Lojistik - Development of an Exoskeleton System for Human Augmentation
TÜBİTAK Primary Subjects R&D Funding Program (TÜBİTAK 1003) (2018 – 2021)
Principle Investigator Industry Partner: Aselsan - Development of a Pelvis-Hip Exoskeleton for Robot-Assisted Gait Training
TÜBİTAK Scientific and Technological Research Project Grant (TÜBİTAK 1001) (2015 – 2018)
Principle Investigator - Knowledge-Based Reasoning for Robots to Guide Humans in Complex Environments
FP7 ERA-Net COACHES and TÜBİTAK Scientific and Technological Research Project Grant (2014 – 2017)
Researcher (Principle Investigator: Prof. Esra Erdem) - Rehabilitation Robotics Ontology on the Cloud: Representing and Querying Big Data
Sabancı University Internal Research Grant (2014 – 2016)
Co-Principle Investigator (Co-Principle Investigator: Prof. Esra Erdem) - Design of Safe and Autonomous Service Robot Systems
TÜBİTAK Scientific and Technological Research Project Grant (TÜBİTAK 1001) (2013 – 2015)
Principle Investigator - Development of a Shoulder-Elbow Exoskeleton for Robot-Assisted Therapy
EU FP7 TD1006 COST Grant and TÜBİTAK Scientific and Technological Research Project Grant (2011 – 2014)
Principle Investigator - Cognitive Factories
TÜBİTAK Scientific and Technological Research Project Grant (TÜBİTAK 1001) (2011 – 2014)
Researcher (Principle Investigator: Prof. Esra Erdem) - A Brain-Computer Interface-based Robotic Rehabilitation System
Sabancı University Internal Research Grant (2011 – 2014)
Researcher (Principle Investigator: Prof. Mujdat Cetin) - Bimanual Rehabilitation System for Distal Upper Extremity Therapy (REHAB-DUET)
EU FP7 – Marie Curie International Reintegration Grant (2008 – 2012)
Principle Investigator - Towards Intelligent, Interactive, Personalized Robot-Assisted Physical Rehabilitation
Sabancı University Internal Research Grant (2009 – 2011)
Co-Principle Investigator (Co-Principle Investigator: Prof. Esra Erdem) - Robot-Assisted Rehabilitation System
TÜBİTAK Scientific and Technological Research Project Grant (TÜBİTAK 1001) (2008 – 2011)
Principle Investigator - Performance Comparison of Feature Extraction Methods to be used in Prehensile sEMG Signals for Control of a Multi-functional Prosthetic Hand
TÜBİTAK Short Term Research and Development Funding Programme (TÜBİTAK 1002) (2009 – 2010) Principle Investigator - Manual Skill Training and Rehabilitation via Force Feedback Devices
TÜBİTAK Career Award (TÜBİTAK Kariyer) (2008 – 2010)
Principle Investigator
- Automation of Manual Tread Loading Process during Truck-Bus Tire Manufacturing
Turkish Ministry of Trade and Industry, Industry Thesis Program (SAN-TEZ) (2008 – 2009)
Principle Investigator Industry Partner: BriSA
Previous Research Projects (outdated)
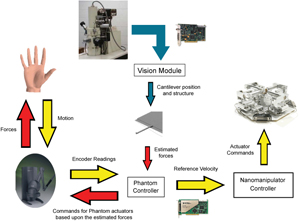 |
Bilateral Control in Tele-Nanomanipulation Systems Nanoscale manipulation promises to be the enabling technology for bottom-up nanoassembly, the ability to operate at the molecular level to build larger structures with fundamentally new molecular organization. Real-time force feedback is an indispensable feature of teleoperated nanomanipulators since the telemanipulated nanoobjects are highly fragile and the visual feedback alone is unreliabile especially when it comes to perception of depth and contact. This project proposes a bilateral teleoperation setup that comprises of a haptic interface on the master side and a nanomanipulator on the slave side. Having a large impact on the essence of nanotechnology, such a telenanomanipulator will have target applications in nanoassembly and study of nanoparticles, molecules, DNA and viruses. |
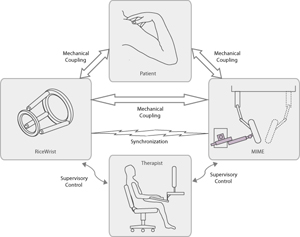 |
Design and Implementation of Robotic Devices for Rehabilitation Stroke, experienced by over 500,000 patients in the U.S. each year, is the leading cause of long-term disability in adults. The most effective post-stroke treatment for impaired patients is physical rehabilitation. Even though rehabilitation robots promise a great value by reducing the work load of physical therapists and providing assist modes that are not feasible otherwise, there does not exist a consensus on how to actually implement robotic assistance. This project proposes to team up with a group of physicians and occupational therapists, and to design and build several robotic devices to provide patients with tools to improve their quality of life. Moreover, the project includes human subject experiments on stroke patients to test efficacy of different robotic assist modes during rehabilitation. Results of this research have strong implications to design of robot assisted rehabilitation schemes and will benefit numerous stroke survivors. |
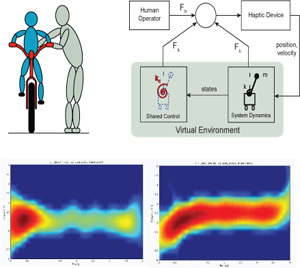 |
Modeling of Human Motor Control and Learning The neural mechanisms for acquisition of sophisticated motor behavior in humans are very complex. There exists strong evidence in literature that human nervous system may be adaptively tuning internal models of the controlled system dynamics during motor learning. This project investigates existence and formation of internal models during sensorimotor learning by conducting human subject experiments on an underactuated dynamic task with various haptic assistance modes. Studying the aftereffects revealed by the experimental data, the aim of the project is to verify efficacy of several techniques as models of internal model adaptation. Results of this study will enable novel shared control paradigms that improve the rate of internal model adaptation through use of haptic aid. Contributing to basic understanding of human senorimotor behavior, this study has numerous implications in rehabilitation and manual skill training. |
 |
Modeling, Simulation, Control and Estimation of Switching (Hybrid) Dynamical Systems An important set of open problems in the field of hybrid dynamical systems is the development of stable state and parameter estimation algorithms. Hybrid estimation is significantly more challenging than its continuous counterpart due to the inherent nonlinearities introduced by the mode changes. This project aims to develope a family of hybrid model reference adaptive parameter estimators to remedy the limited applicability of existing methods. Unlike traditional approaches, these estimators operate directly on systems with changing contact conditions. Capturing the information contained within the mode changes, these hybrid estimators can identify parameters that are not identifiable with their continuous counterparts. The proposed estimation algorithms are based on the utilization of hybrid trajectory sensitivities to perform updates on a multiple-mode adaptive estimator architecture. Enhancing the properties of the existing methods, these estimators contribute to the filed of hybrid systems and will have an impact on various applications including biped robotic walking and automatic generation of the mechanical impedance of virtual objects. |
 |
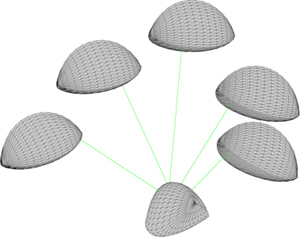
Haptic Rendering of Parametric Surfaces Existing collision detection algorithms lack stability guarantees and have limited extensibility. We have contributed a novel closest point algorithm that possesses provable global convergence and greater extensibility than the previously available methods. This new algorithm is simpler to implement and is robust against disturbances. Furthermore, since the analytic limits of performance are available for the algorithm, it can be easily tuned for optimal computational efficiency without sacrificing stability. To develop such an algorithm, weI formulated the problem as a hybrid dynamical system that incorporates dependence on rigid body motion, surface shape, and surface boundary interconnectedness. Then we solved this optimization problem using a switching feedback controller derived from a common control Lyapunov function. Supervisory control (switching) is required to render the surface patch invariant resulting in global stability. Besides its impact in computer simulations, the potential uses of the new algorithms include CAD/CAM and robot path planning. |
 |
Addressing Current Challanges in Bilateral Control Arguably the destabilizing effect of time delays remains the most important difficulty facing teleoperation technology. In this project, we are interested in employing system identification techniques to construct local models of the remote environment such that when used with predictive algorithms the instability induced by time delays can be remedied. I plan to utilize adaptive estimators for automatic generation of the impedances that describe a given remote environment and aim to synthesize nonlinear controllers that ensure stability and high-fidelity. In addition to greatly improving teleoperator performances, this research will significantly influence exploration with mobile robots and control of mechatronic devices through the internet. |
 |
Applying Controls Theory to a Class of Computational Geometry Problems Existing algorithms to solve many practical problems in computational geometry, such as calculating Voronoi diagrams, tracing the intersection curves of interpenetrated geometries, and locating the visible regions of non-convex objects are computationally demanding since they are derived from extensive iterative searches. Moreover, lacking stability proofs or large basins of attraction, most of these traditional algorithms are very sensitive to numerical disturbances. In this project, we propose to design fast and robust algorithms based on control theoretic tools. We intend to model the geometric problems as differential problems and to design feedback stabilized integration algorithms taking advantage of the relative simplicity of my models. Essentially, this project represents a generalization of our previous work in minimum distance algorithms to a larger class of geometrical problems. Just as an initialization point can be stabilized at the closest point solution, multiple initialization points spread over an object can be stabilized at a set of distinct points, for example, defining the Voronoi diagram. Efficient and reliable solutions to these problems have direct and immediate relevance to applications in computer graphics, mobile robotics and simulation. |
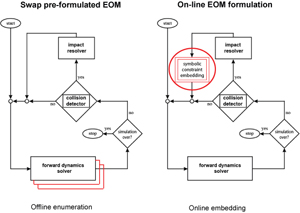 |
Merging Symbolic and Numerical Methods to Enable Interactive Multibody Dynamics Even though a whole spectrum of techniques has been proposed to handle multibody systems with changing constraints, none of the simulators based on these techniques are extensible for use in real-time interactive simulations. Previously, we have laid out the foundation and built a real-time multibody simulation package that introduces a unique approach to simulation of systems with changing topology. We intend to further pursue and develop the key idea that incorporates symbolic manipulation routines into the run-time solution code to build specially tailored dynamical models in their minimal ODE form. Merging symbolic and numerical methods to undertake constraint-embedding on-the-fly enables simulations in which unforseen constraints are imposed during run-time (as in shared gaming environments), or where there exist a large number of constraints for which enumeration is unwieldy. The new approach also remedies issues of drift associated with DAE solvers. With this project, weI aim to fill the need for an open-architecture, advanced, multibody simulation package. |

